W25Q64简介
•W25Qxx系列是一种低成本、小型化、使用简单的非易失性存储器(数据掉电不丢失),常应用于数据存储、字库存储、固件程序存储等场景
•存储介质:Nor Flash(闪存)
•时钟频率:80MHz / 160MHz (Dual SPI双重SPI) / 320MHz (Quad SPI四重SPI)
•存储容量(24位地址):
W25Q40: 4Mbit / 512KByte
W25Q80: 8Mbit / 1MByte
W25Q16: 16Mbit / 2MByte
W25Q32: 32Mbit / 4MByte
W25Q64: 64Mbit / 8MByte
W25Q128: 128Mbit / 16MByte
W25Q256: 256Mbit / 32MByte
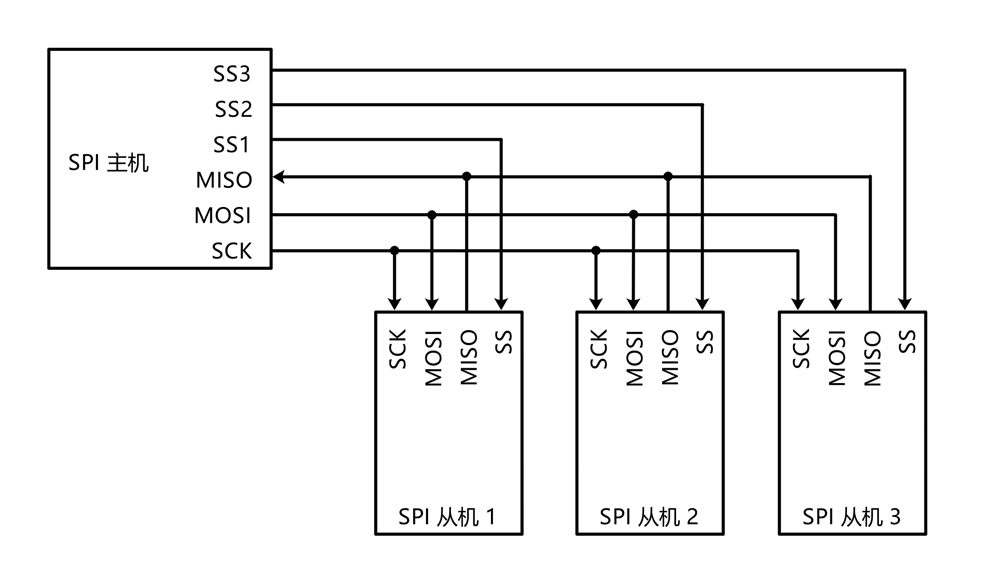
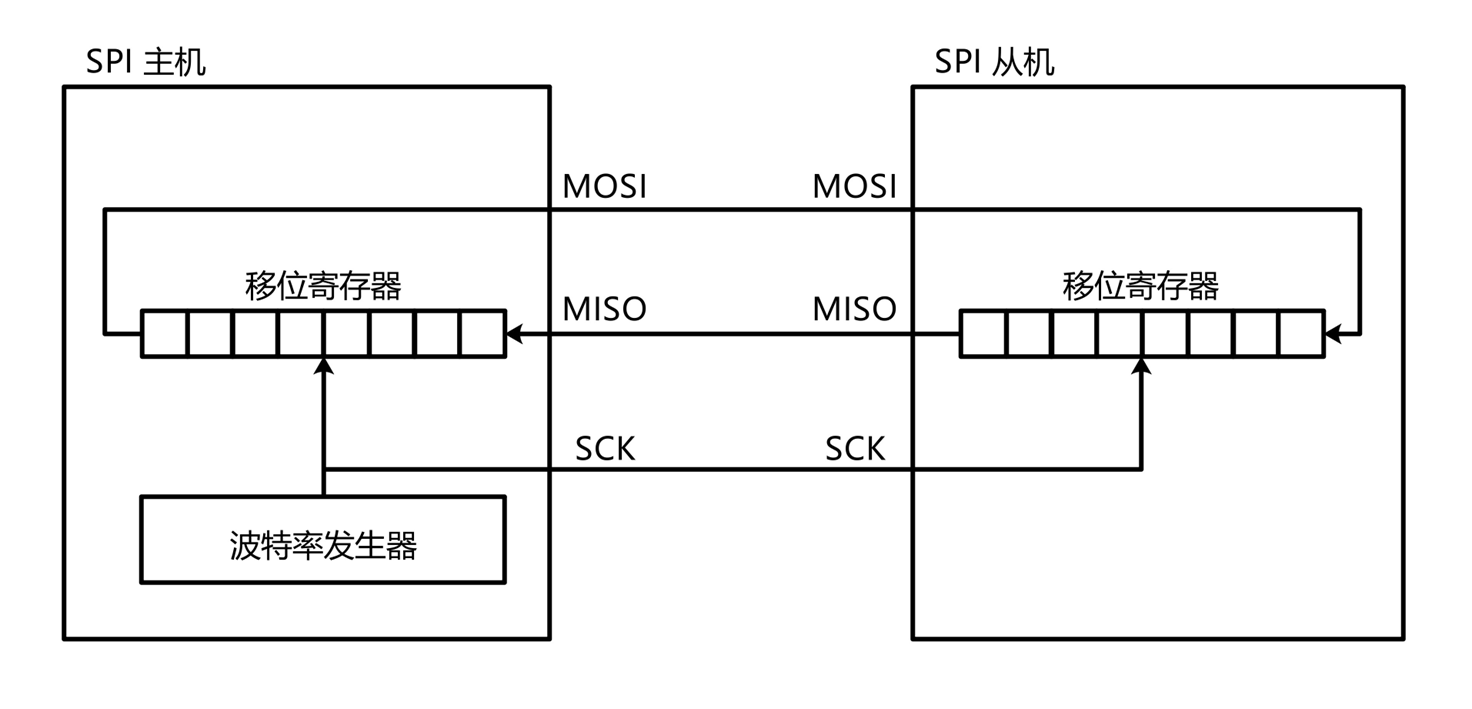
硬件电路
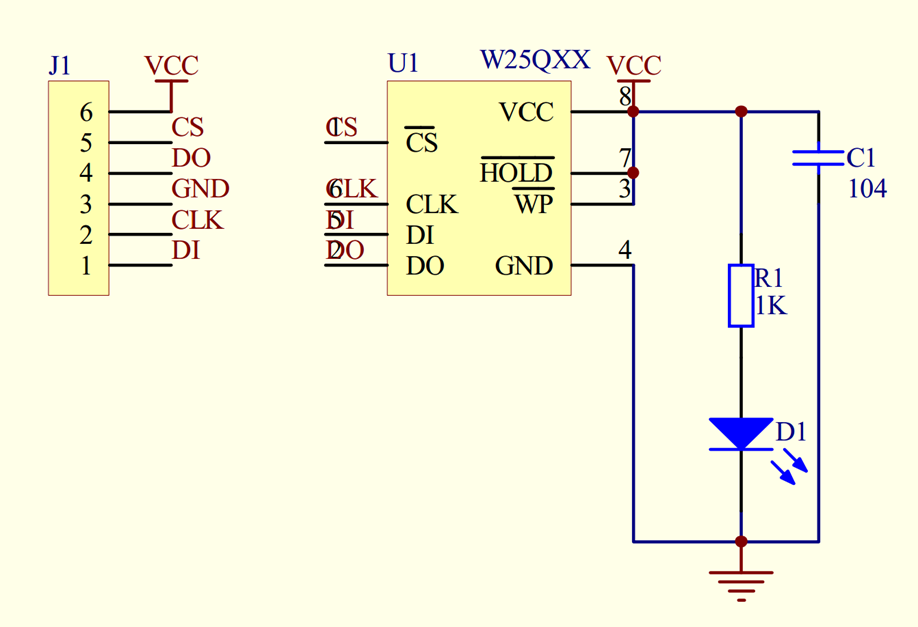
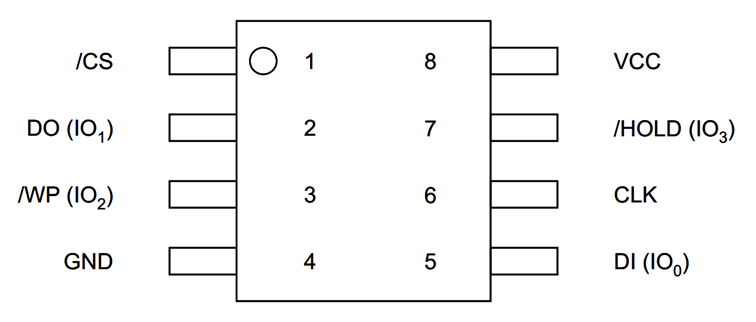
| 引脚 | 功能 |
|---|---|
| VCC、GND | 电源(2.7~3.6V) |
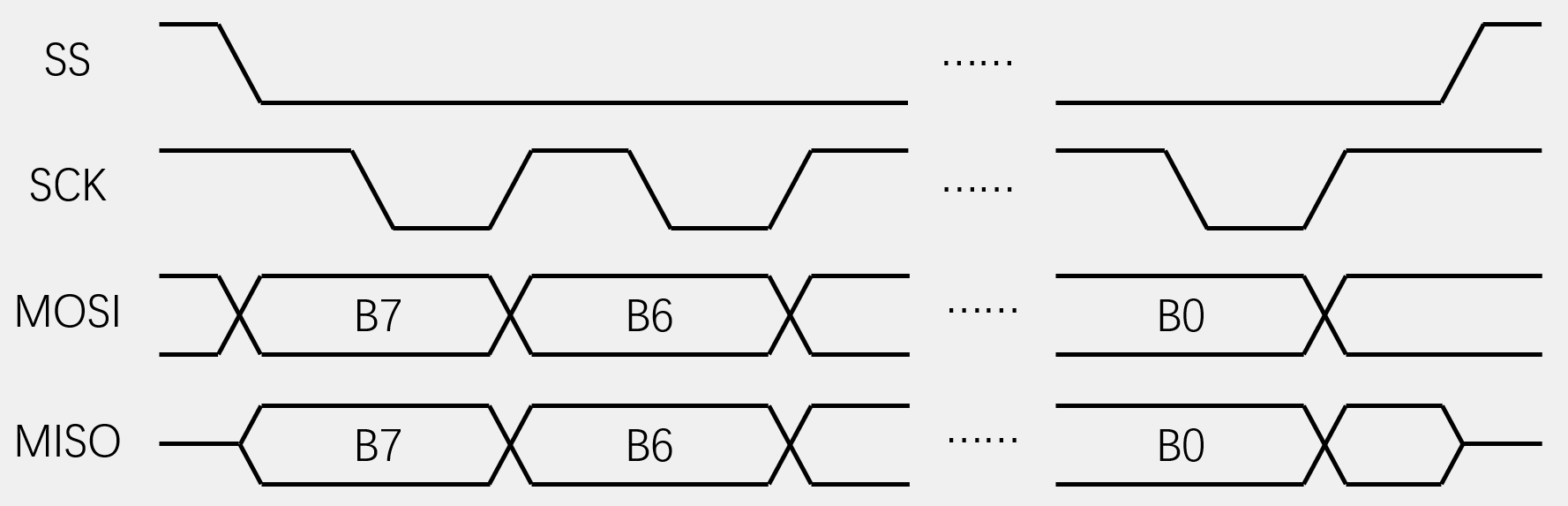
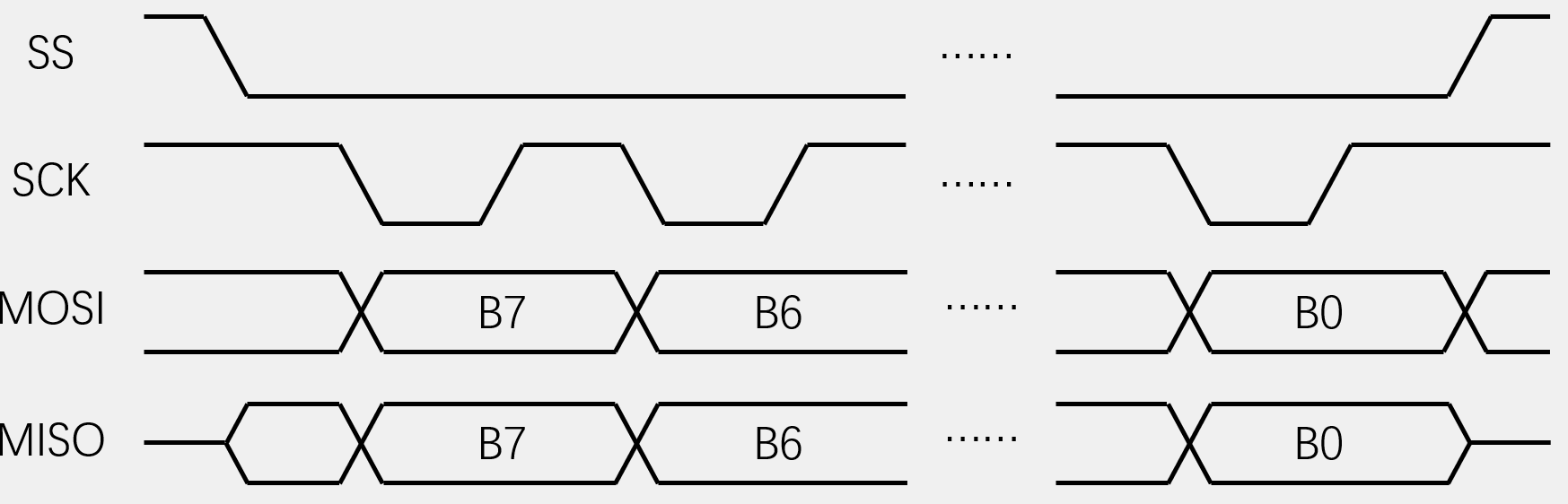
| CS(SS) | SPI片选 |
| CLK(SCK) | SPI时钟 |
| DI(MOSI) | SPI主机输出从机输入 |
| DO(MISO) | SPI主机输入从机输出 |
| WP | 写保护 |
| HOLD | 数据保持 |
W25Q64框图
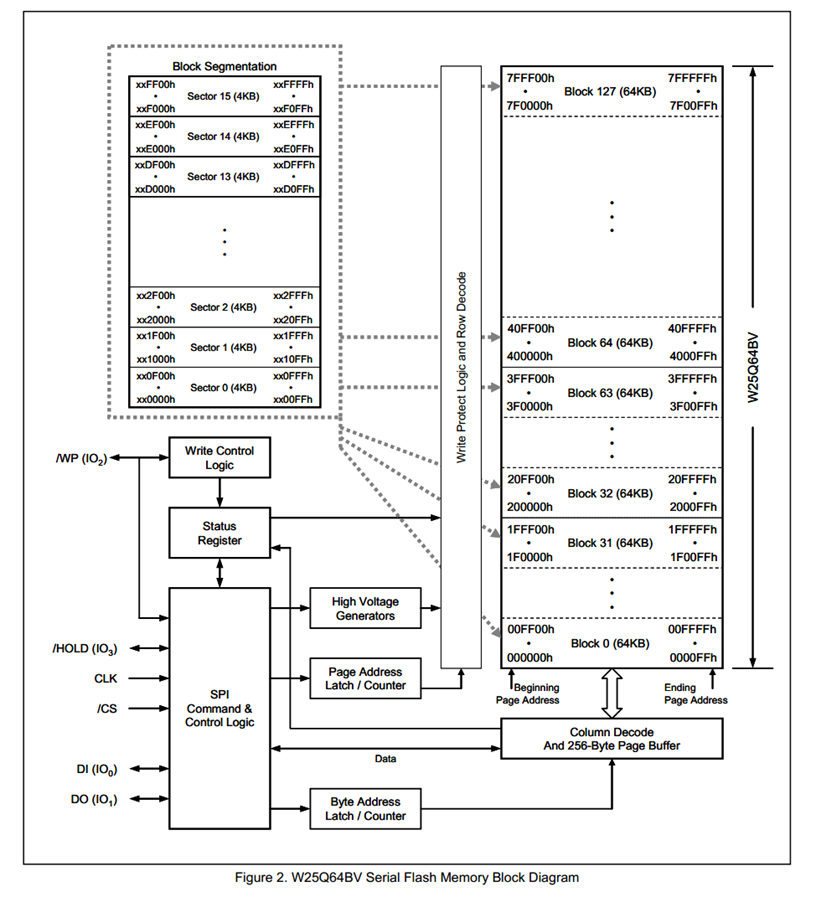
右上角为存储器的规划示意图,以64KB为基本单元,分为若干个块。
Flash操作注意事项
写入操作时:
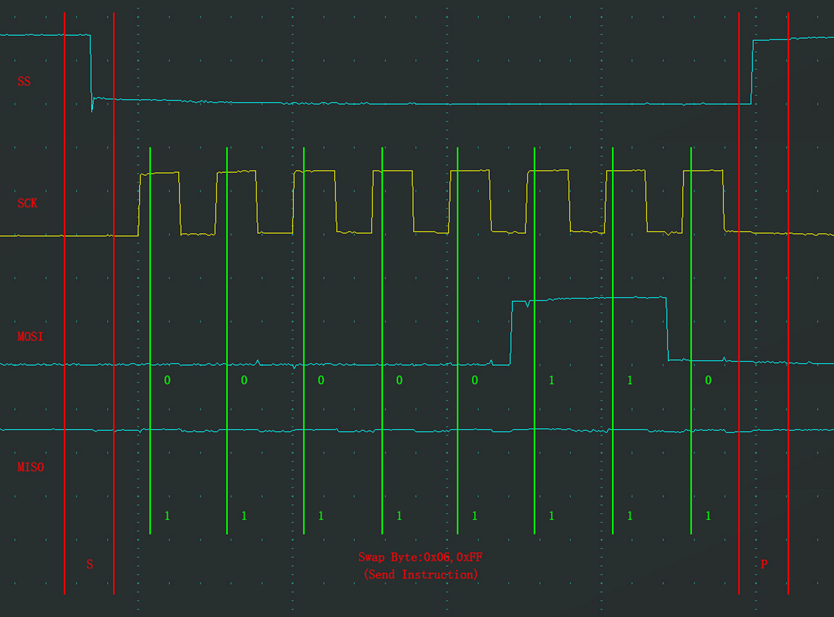
•写入操作前,必须先进行写使能(使用SPI发送写使能的指令)
•每个数据位只能由1改写为0,不能由0改写为1
•写入数据前必须先擦除,擦除后,所有数据位变为1
•擦除必须按最小擦除单元进行
•连续写入多字节时,最多写入一页的数据,超过页尾位置的数据,会回到页首覆盖写入
•写入操作结束后,芯片进入忙状态,不响应新的读写操作
读取操作时:
•直接调用读取时序,无需使能,无需额外操作,没有页的限制,读取操作结束后不会进入忙状态,但不能在忙状态时读取
软件SPI读写W25Q64
MySPI.c
1 |
|
W25Q64.c
1 |
|
main.c
1 |
|