HEX数据包
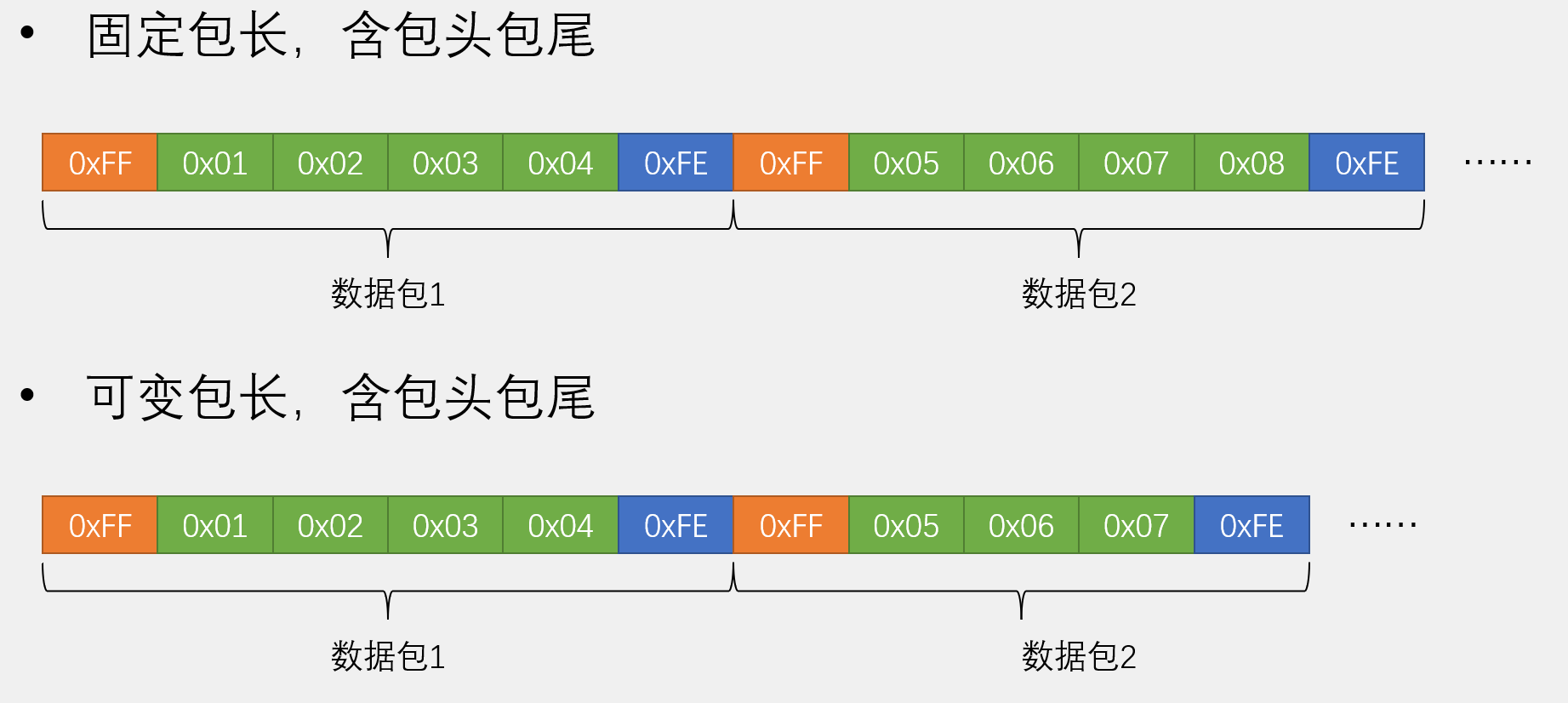
固定包长,含包头包尾:每个数据包的长度固定不变,前面是包头,后面是包尾
可变包头,含包头包尾:每个数据包的长度可以不一样,前面是包头,后面是包尾
固定包头这里规定,每组4个字节,在这4个字节之前,加上定义的包头0xFF,后面加上定义的包尾0xFE
另外,还可以不要包尾,只使用一个包头FF,接收到包头FF后,开始接收,收够4个字节之后,置标志位,一个数据包接收完成。
如果传输的数据本身就是FF和FE怎么办呢?
限制载荷数据的范围,在发送时进行限幅;
或者使用固定长度的数据包,可以通过包头包尾对其数据,哪个数据是包头,哪个数据是包尾,哪个数据是载荷数据,在接收载荷数据时,不会判断这个数据是否为包头或包尾;
或者增加包头包尾的数量,让它尽量呈现出载荷数据出现不了的状态
如果载荷不会和包头包尾重复,可以选择可变包长
数据长度可以任意改变,因为包头和包尾都是唯一的,出现包头,就接收,出现包尾,就停止接收。
文本数据包
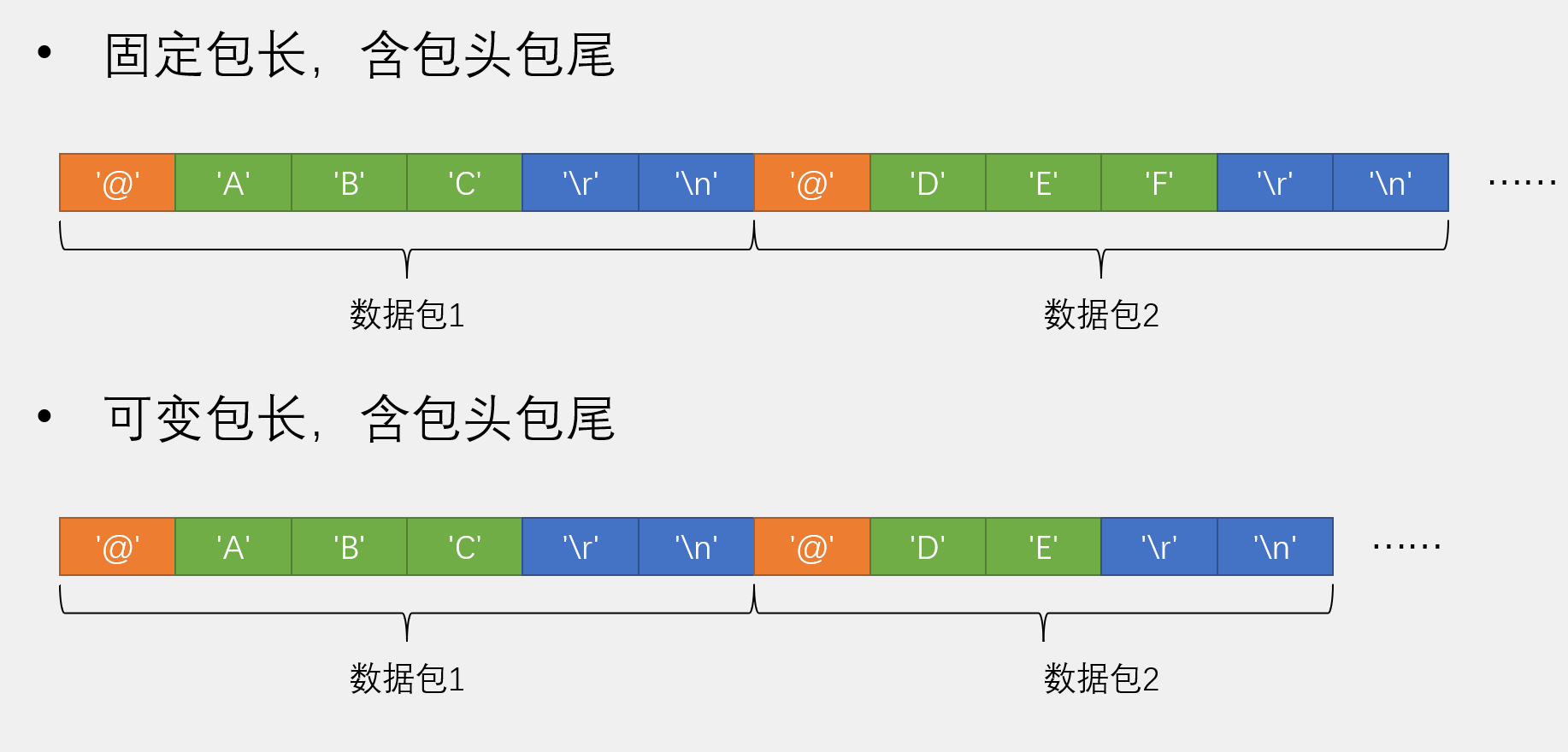
在文本数据包中,数据经过了一次编码和译码,表现出来的文本格式。
由于数据译码成了字符形式,就可以有大量的字符作为包头和包尾,可以有效避免载荷和包头包尾重复的问题。
HEX数据包接收
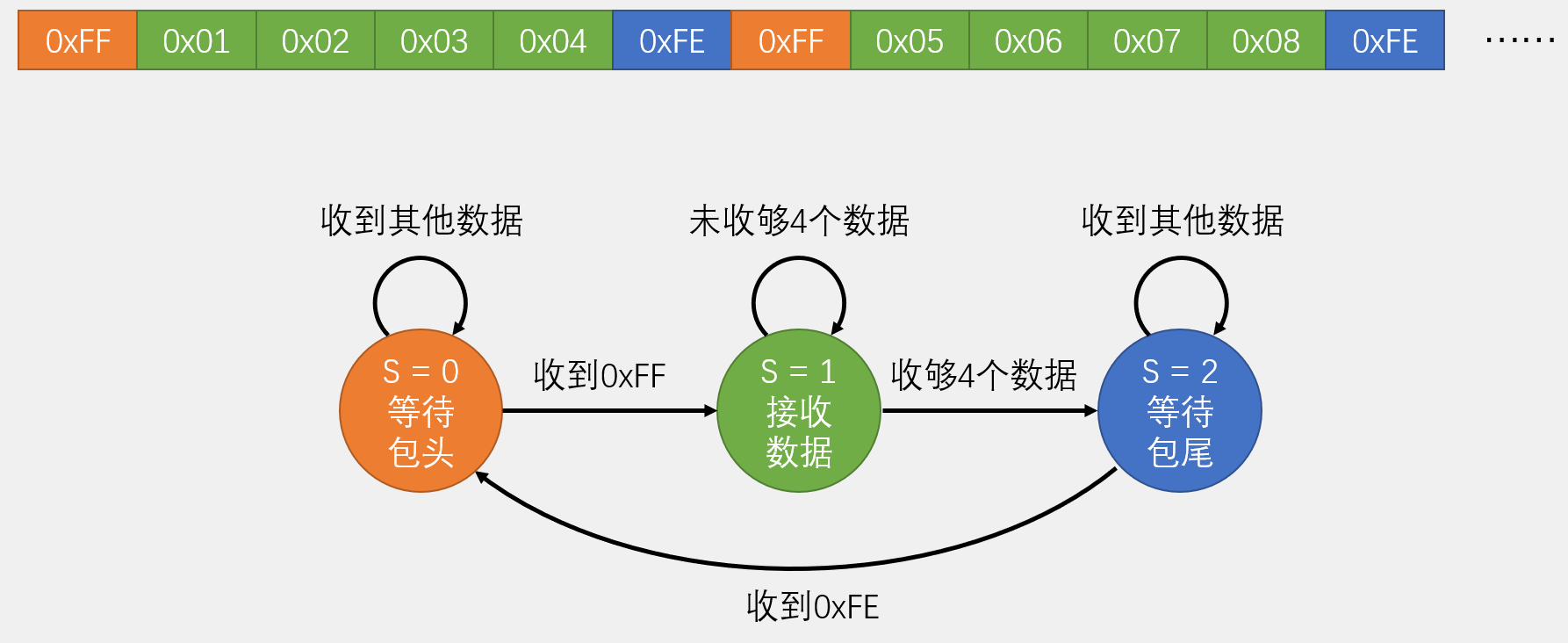
对于数据包来说,接收具有前后的关联性,包头->数据->包尾,对于这三种状态,需要不同的处理逻辑,即状态机。
对于接收数据,可以定义为三个状态。等待包头,然后接收数据,最后等待包尾,每个状态用一个变量来标志一下。
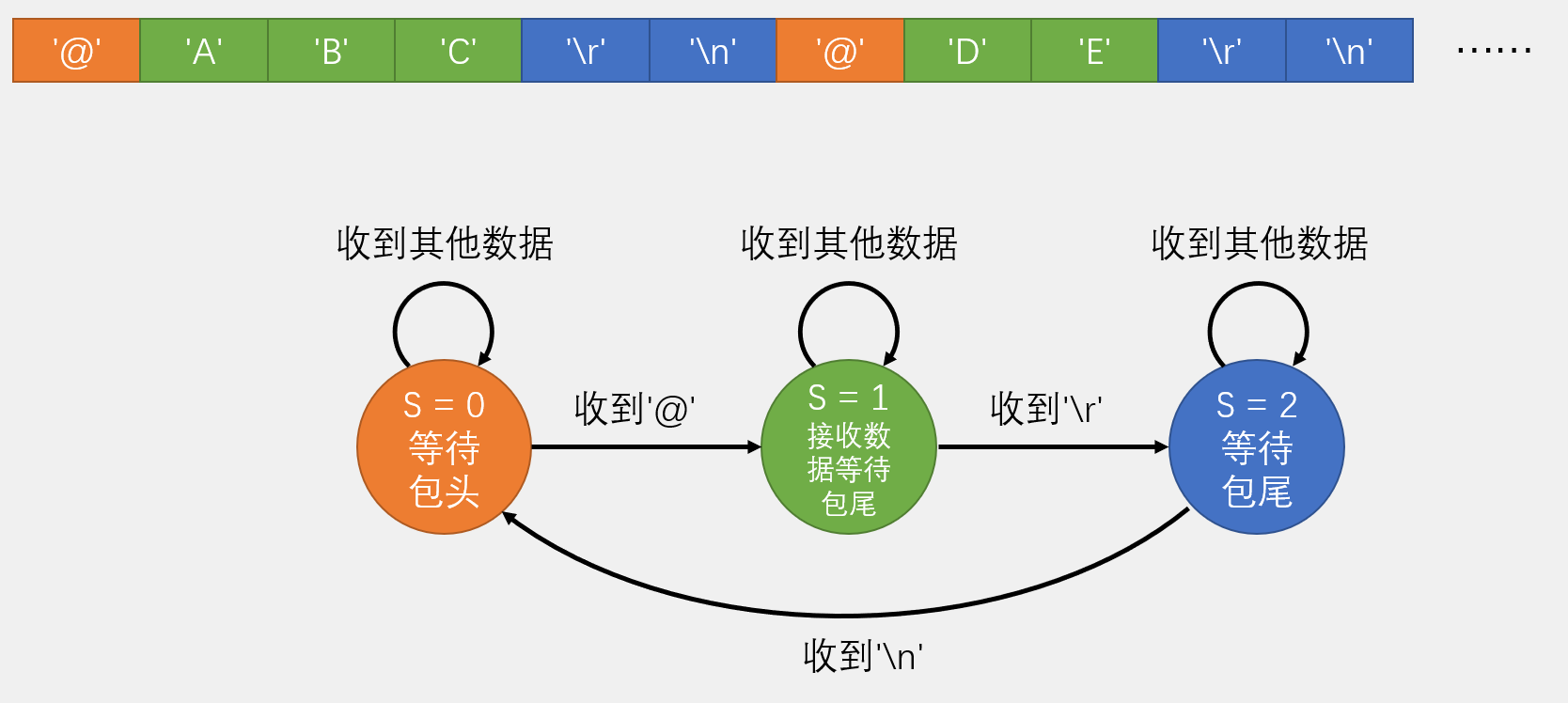
文本数据包接收
串口收发HEX数据包
Serial.c
1 |
|
main.c
1 |
|
串口收发文本数据包
Serial.c
1 |
|
main.c
1 |
|