MPU6050简介
•MPU6050是一个6轴姿态传感器,可以测量芯片自身X、Y、Z轴的加速度、角速度参数,通过数据融合,可进一步得到姿态角,常应用于平衡车、飞行器等需要检测自身姿态的场景
•3轴加速度计(Accelerometer):测量X、Y、Z轴的加速度
•3轴陀螺仪传感器(Gyroscope):测量X、Y、Z轴的角速度
MPU6050参数
•16位ADC采集传感器的模拟信号,量化范围:-32768~32767
•加速度计满量程选择:±2、±4、±8、±16(g)
•陀螺仪满量程选择: ±250、±500、±1000、±2000(°/sec)
•可配置的数字低通滤波器
•可配置的时钟源
•可配置的采样分频
•I2C从机地址:1101000(AD0=0)
1101001(AD0=1)
硬件电路
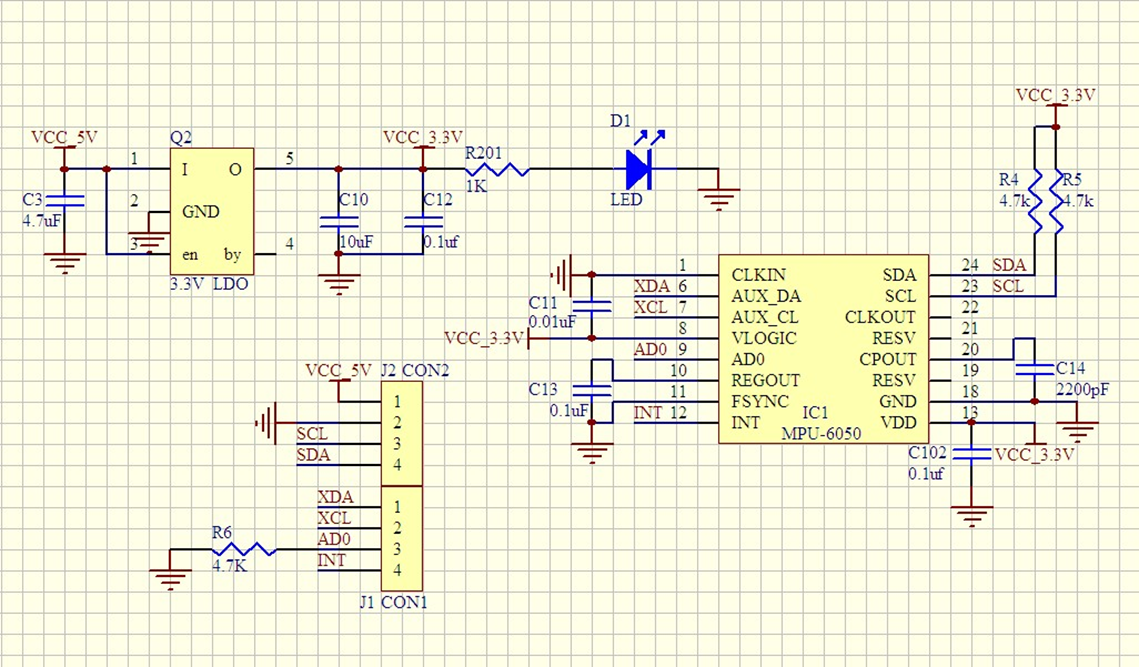
| 引脚 | 功能 |
|---|---|
| VCC、GND | 电源 |
| SCL、SDA | I2C通信引脚 |
| XCL、XDA | 主机I2C通信引脚 |
| AD0 | 从机地址最低位 |
| INT | 中断信号输出 |
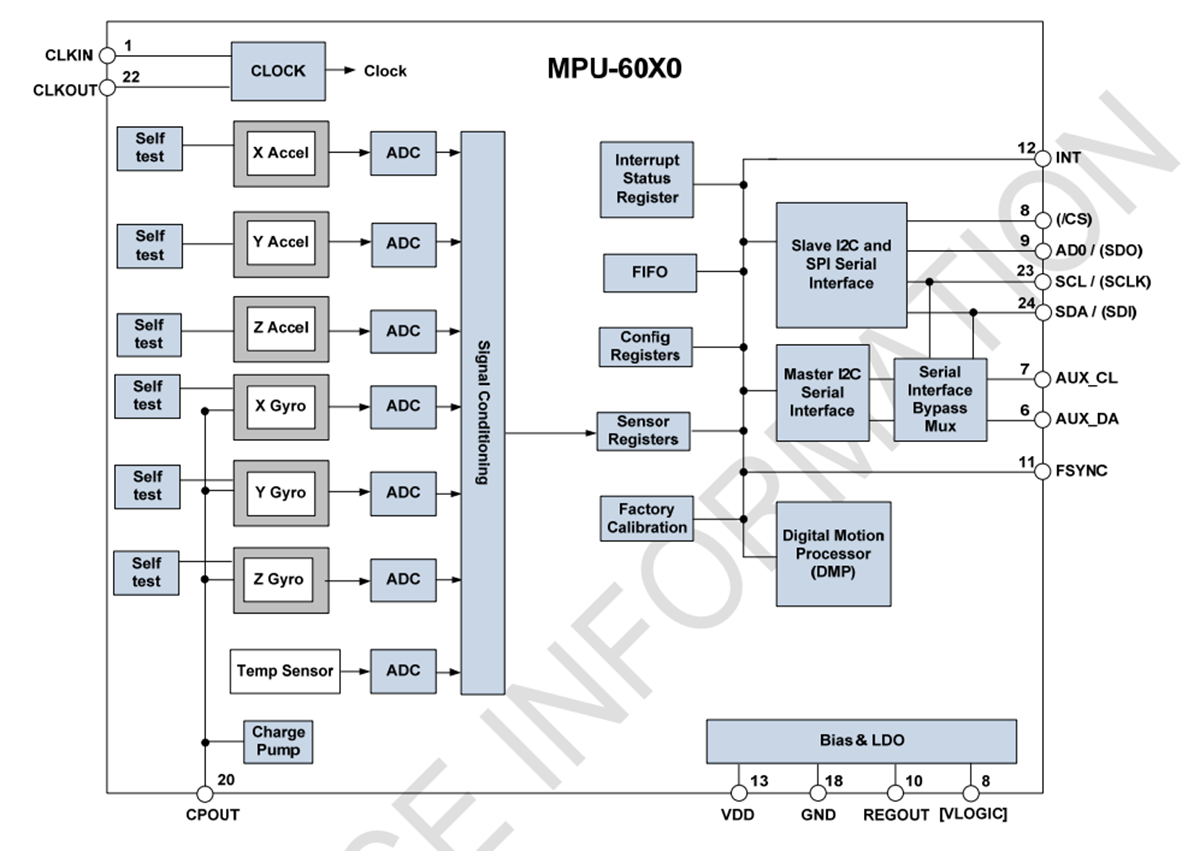
MPU6050框图
软件I2C读写MPU6050
MyI2C.c
1 |
|
MPU6050.c
1 |
|
main.c
1 |
|