| 助记符 | 功能 |
|---|
| CMP | 数据比较 |
| ZCP | 数据区间比较 |
| MOV | 传送 |
| BMOV | 数据块传送 |
| PMOV | 数据块传送 |
| FMOV | 多点重复传送 |
| EMOV | 浮点数传送 |
| FWRT | FlashROM 的写入 |
| MSET | 批次置位 |
| ZRST | 批次复位 |
| SWAP | 高低字节交换 |
| XCH | 两个数据交换 |
16位和32位传送指令(MOV,DMOV)
16位传送指令:MOV
32位传送指令:DMOV
将指定软元件中的数据照原样传送到另一个软元件中。
MOV K10 D10:将K10传送到D10,就是把十进制的10赋值给D10。

运算结果以32位输出的应用指令(MUL等)、32位数值或32位软元件的高速计数器当前值等数据的传送,必须使用DMOV指令。
DMOV D0 D10 :将D1和D0中的数据传送到D11和D10中。

数据块传送(BMOV)
将指定的软元件的数据照原样传送到其他软元件中。
BMOV D5 D10 K3
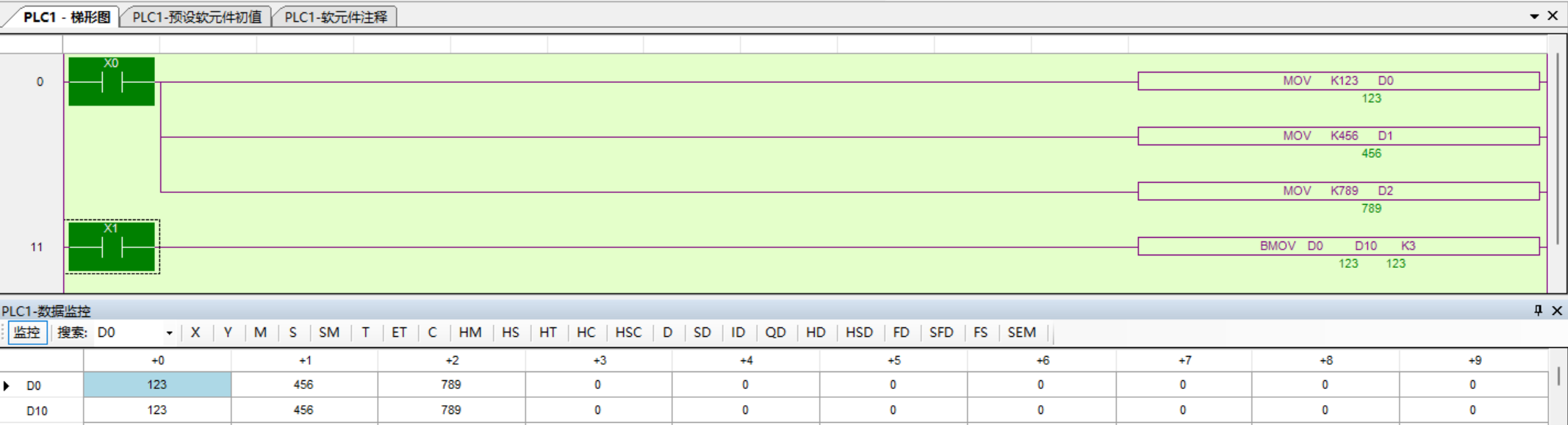
将D5开始的三个字,即D5,D6,D7批量传送到D10开始的三个字,即D10,D11,D12。
注意:使用BMOV指令不要产生数据重叠。
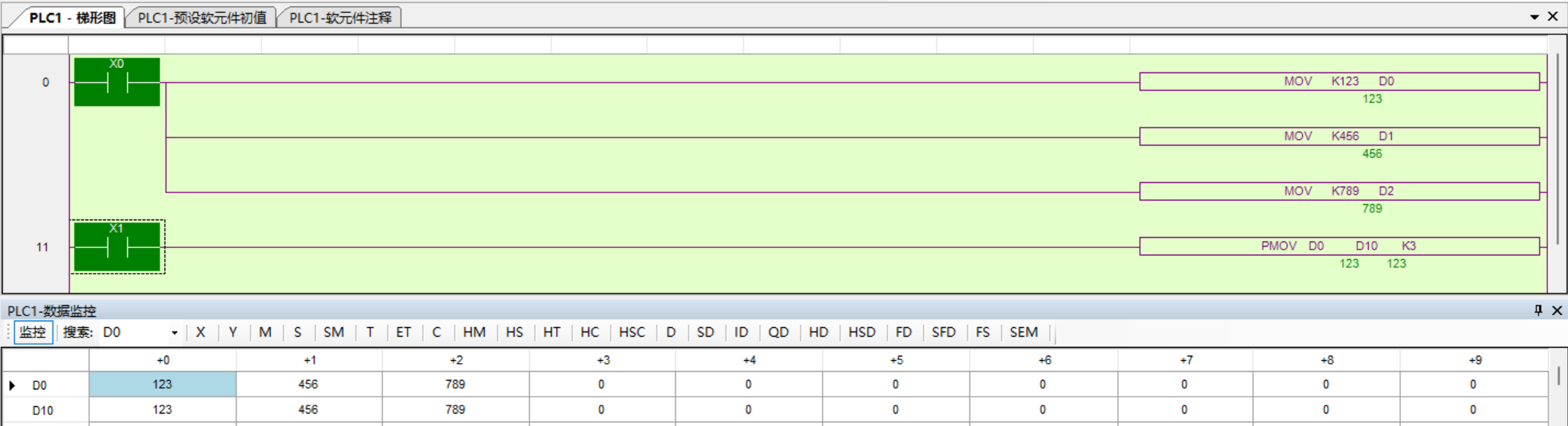
数据块传送(PMOV)
本指令比BOMV效率更高。
PMOV和BMOV使用方法一样。
PMOV D5 D10 K3
16位多点重复传送和32位多点重复传送(FMOV,DFMOV)
16位多点重复传送(FMOV)
FMOV K0 D0 K10:将K0传送至D0~D9,同一数据多点传送指令。

32位多点重复传送(DFMOV)
DFMOV D0 D10 K3:将D0、D1中的内容传送到D10、D11;D12、D13;D14、D15。

浮点数传送(EMOV)
EMOV K3.14 D0:将3.14传送到D0、D1中

EMOV D0 D10:将D0、D1传送到D10、D11

常数K、H被指定为源数据时,自动转换为2进制浮点数。
K500自动二进制浮点化。
FlashROM写入(FWRT)
单字的写入
FWRT D0 FD0:将D0里面的值写入到FD0中
双字的写入
DFWRT D0 FD0:将D0里的数据写入到FD0、FD1
多字的写入
FWRT D0 FD0 K3:将D0D2里的值写入到FD0FD2
批次置位(MSET)、批次复位(ZRST)
将指定范围的位软元件进行置位或复位操作。
MSET M10 M120:整体置位元件M10M120
ZRST M500 M559:整体复位位元件M500M559
ZRST D0 D100:整体复位字元件D0~D100
高低字节交换(SWAP)
将指定寄存器的高8位字节和低8位字节进行交换。
SWAP D10 将D10这个16位寄存器的高8位和低8位交换。
上例中如果将条件X0改为常开或常闭线圈触发,当输入X0为ON时,每个扫描周期都执行一次该指令,所以建议用上升沿或下降沿触发。
交换指令(XCH)
将两个软元件中的数据相互交换。
16位指令
XCH D10 D11:把D10的数据放到D11,D11的数据放到D10
32位指令
DXCH D10 D20:把D10、D11中的数据和D20、D21中的双字数据交换。